Wireless Vibrotactile Feedback
This project was the final project for my EE 478 Embedded systems capstone, a little description of the project goes like this: The user of our device was to be able to control a robotic manipulator via the use of EMG signals sent via wireless RF simpliciTI protocol, further the force sensed at the tips of the robotic manipulator when grasping an object was sent back via wireless and this force was used to modulate the amplitude of a tactor’s vibration to provide force feedback allowing the user to control the amount of force he/she used and to avoid a crushing fragile object e.g. fragile plastic cups, wine glasses, Styrofoam cups … etc.
Here is a link to the video
Here is the complete project report:
Wireless Vibrotactile Feedback Report
And below are the pictures of a few important parts of the project:
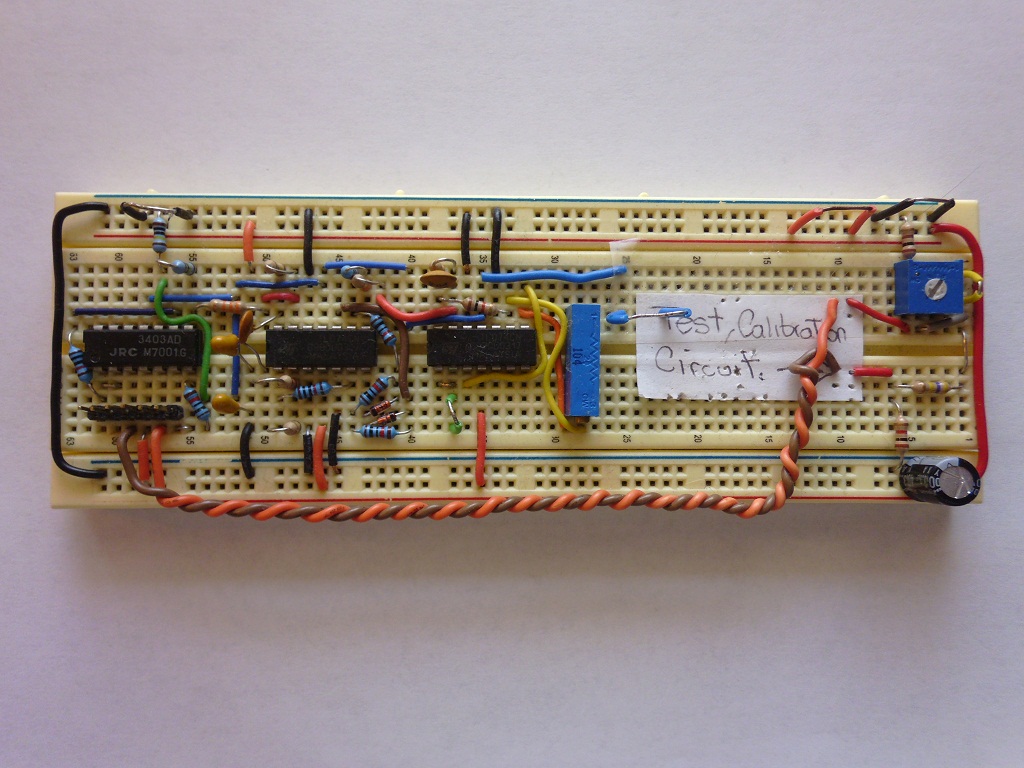
Here is a brief description of the circuit, I am sorry since i did this sometime ago and I cant remember the details but here it is, there is basically an instrumentation amplifier circuit implemented using discrete op-amps, the configuration is such as to give us the maximum common mode rejection ratio to get rid of the electromagnetic noise surrounding all of us that introduce noise into the EMG signals, after doing that we amplify the signal as much as possible using an inverting amplifier scheme then passes that signal through an electrolytic capacitor to get rid of any DC component, then we further amplify the signal to bring it as close as possible to rails, then we take that signal and pass it through a full wave rectifier so that we end up with an only positive signal then we pass this through an active low pass filter with an inverting configuration and finally we take that signal and invert it again and we have a potentiometer to provide variable gain for users with different EMG signals.

We used the micro controller to digitize the signal coming in from both the force sensing resistors at the tip of the robotic manipulator and the signal from the EMG acquisition circuit, the integrated radio is used for bidirectional transmission.
It was a nice team project, hope you enjoyed the video and the pictures.
Leave your comments below (or comment directly here).
Thank you for your feedback.